
27.09.2019 toimus Tallinnas ERASMUS+ projekti INLEARC avakoosolek
Koosolekul tutvustati projekti partnereid, anti ülevaade projekti eesmärkidest, intellektuaalsetest väljunditest ja oodatavatest tulemustest, täpsustati ülesandeid partnerite vahel ja arutati projekti levitustegevusi. Samuti lepiti kokku ülesanded ja tegevused järgmiseks perioodiks intellektuaalsete väljundite loomiseks (O1-A1, O1-A2, O2-A1).
INLEARC projektimeeskond külastas Norcar BSB Eesti filiaali uudsete töökohapõhiste õppematerjalide väljatöötamiseks
Jaanuaris 2020 alustas INLEARC projektimeeskond koostööd Norcar BSB Eesti filiaaliga töökohapõhiste õppematerjalide väljatöötamiseks. Norcar BSB Eesti AS on Soomes asuva kontserni Norcar-BSB Oy tütarfirma, mis on tänaseks kasvanud üle 4000 m2 tootmispinnaga ettevõtteks ja toodangust 80% läheb ekspordiks. Ettevõtte peamise toodangu moodustavad traktori kere detailid ja põllumajandusseadmed. Norcar BSB Eesti AS poolt valmistud detailidest koostatakse väikelaadureid Norcar ja söödatraktoreid Minkomatic. Samas valmistatakse ka erinevaid masinaehituslikke detaile ja sõlmesid (silindrid, õlimahutid, erineva suurusega sulgurluugid jpm).
Projekti raames luuakse Norcar robot-töökohast virtuaalne simuleeritud õppematerjal Moodle õppekeskkonnas kasutamiseks, mis on osa terviklikust tehisintellektil põhinevast õppeplatvormist.

19.02.-20.02.2020 toimus järjekordne ERASMUS+ projekti INLEARC koosolek Soomes, Seinajoe Rakenduskõrgkoolis


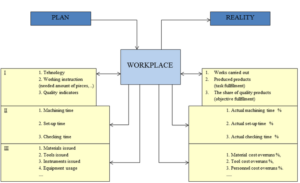
INLEARC projektis koostati töökohapõhise (work-based) õppe kontseptsioon
Töökohapõhise õppe eesmärk on muuta õpe praktilisemaks ja seotumaks tööstuse ootustega vastavatele ametikohtadele ning kaasata õppijaid loovatesse ülesannetesse, mis arendavad nende oskusi tulevikus praktikas ja töös toimetulekuks ning probleemide lahendamisel. Töökohapõhise õppe kontseptsiooni all ei peeta silmas sugugi mitte kitsamalt näiteks praktikate või õppe korraldamist ettevõttes, vaid märksa laiemat nägemust, kuidas kogu õpet integreerida igal tasandil tulevaste ametikohtade vajadustega. Töökohapõhise õppe laiem käsitlus hõlmab endas seega praktikaid, töövarjuks olemist, ettevõtete külastusi, ettevõtluskogemust, tööandjatega koostöös pakutavad õpet ning tööstuse viimist kooli läbi virtuaalsete tehnoloogiate.
Töökohapõhise õppe strateegia on INLEARC projektis aluseks uudsete e-õppe materjalide arendusel (vajuta pildile, et näha suuremat pilti).
INLEARC meeskond koostas robotjaoskondade funktsionaalsuse kirjelduse (O1-A1)
Tegevuse peamiseks väljundiks oli tutvuda partnerriikide eri tüüpi robotjaoskondadega. Tegevuse käigus külastati ettevõtteid ning kaardistati kasutusel olevaid robotjaoskondi, et hinnata nende funktsionaalsust. Kokku külastati 12 ettevõtet Eestist, Lätist ja Soomest ning peamisteks tegevusvaldkondadeks robotjaoskondadel olid:
- Keevitus,
- Koostamine,
- CNC tööpinkide teenindamine,
- Painutamine,
- Pakkimine ja ladustamine.
Analüüsi käigus hinnati robotjaoskondade automatiseerimise taset ning programmeerimise meetodeid ning hinnati võimalusi kuidas olemasolevaid robotjaoskondi edasi arendada. Samuti kuidas rakendada reaalseid näiteid tööstusest õppeprotsessis. Valitud näited tööstused on sisendiks partnerriikide õppekursuste arendamisel. Robotjaoskondade valdkonnad:
Robot-keevituse töökoht Alise Technic OÜ-s:

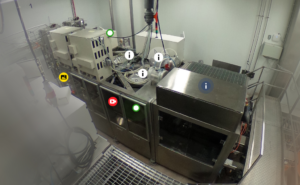
Robot-töökoha kirjeldus Soomes Atria PLC alusel (O1-A1)
Seamk’i projektimeeskond külastas ettevõtet Atria PLC eesmärgiga kirjeldada robot-töökohta. Valiti robotiseeritud pakkimisliin ja sellega seonduvad tegevused. Seamk’i projektimeeskond kasutas 360° kaameratehnoloogiat, et jäädvustada robot-töökoha funktsionaalsust erinevatest vaatenurkadest. Pildid ja videod koondati hiljem ThingLink platvormile. Projekti meeskonnal õnnestus väga hästi analüüsida robot-töökoha funktsionaalsust ja töötaja rolle pakkimisliinil.
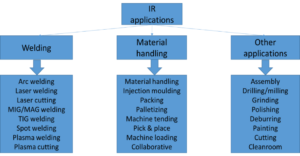
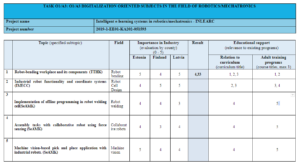
Tööstuse vajaduste alusel koostati õppe digitaliseerimisele suunatud teemade loetelu robootika ja mehhatroonika valdkonnas (O1-A3)
Tegevuse peamiseks eesmärgiks oli koostada nimistu, mille baasil hakata looma digitaalseid õppematerjale. Sisendmaterjalina kasutati ettevõtete robotjaamade kirjeldusi ning õppematerjalide teemablokid jagati vastavalt uuritud robotjaoskondade valdkondadele. Lisaks võeti arvesse vajalikke baasteadmiste tähtsust nt robotsüsteemide turvaseadmete vallas.
Lisaks vaadeldi partnerriikides olemasolevaid robootika ja mehhatroonikaga seonduvaid õppekavasid ja täiendkoolituse programme, et luua sidusust ning tagada teoreetiline pagas. Tegevuse lõpuks struktureeriti 15 teemaline digitaalne õppematerjalide programm mida kasutatakse sisendina õppematerjalide arendamisel Moodle platvormil, et tagada partnerriikide vahel ühtne andmete jagamise võimalus. Allpool ukse osa näitena teemadest (vajuta pildile, et näha suuremalt):
Lühiülevaade O1-A4 tegevustest
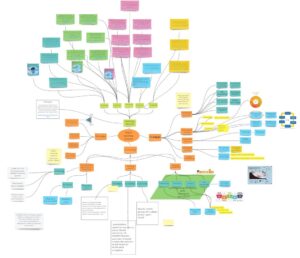
O1-A4 “Strateegia, meetodid ja põhimõtted digitaalse õppeprotsessi arendamiseks” toimusid partneri Seamk juhtimisel ning algasid ühise ideede kogumise tööga, et saavutada ühine vaade arendusprotsessi raamistikule. Koostöö korraldati kasutades Miro platvormi, mis on veebipõhine intuitiivne visuaalne tööriist reaalajas koostööks. Kolme töötoa käigus lõi projektimeeskond oma kogemustele ja teadmistele tuginedes digitaalse õpetamise arendusprotsessi põhjaliku skeemi (vajuta pildile, et näha suuremalt). Järgmiseks koondatakse kõik kogutud ideed aruandesse, mis tegevuse lõpetab.
Lühiülevaade O2-A2 tegevustest
Projekti intellektuaalse väljundi O1 tulemuste põhjal hakkasid projektipartnerid välja töötama moodulipõhiseid e-õppematerjale robootika / mehhatroonika valdkonnas (O2). Eesti projektimeeskond on keskendunud robot-painutusele. Läti projektimeeskond alustas robotite kasutamise ohutusega seotud kasutusjuhtumiga. Soome projektimeeskond on keskendunud robotkooste ja keevitusroboti offline programmeerimise kasutusjuhtumite väljatöötamisele. Kuigi tulemas on veel rohkem, on projekt selles etapis suutnud välja töötada läbiva komplekti e-õppematerjale robootika ja mehhatroonika valdkonnas.
Tutvustasime INLEARC projekti rahvusvahelisel BILT konverentsil “New Qualifications and Competencies brings together Asia-Pacific and Europe”
27. ja 28. aprillil 2021. aastal toimus virtuaalne BILT Europe-Asia Conference, kus osales ka INLEARC projekti esindajana Tallinna Tööstushariduskeskusest Eduard Brindfeldt. Konverentsi teemaks oli uued erialad näiteks: robotitehnik, robotioperaator ja mehhatroonik ning nende kompetentsi omandamine distantsõppe valguses.
Konverentsil osalesime virtuaalses rohelises ruumis, mille peateema oli „Uute kvalifikatsioonide ja pädevuste rakendamine kasutades uusi ja innovaatilisi õpetamis- ja koolitusviise“ (Implementing new qualifications and competencies through new teaching and training approaches).
Oma ettekandes tutvustasime INLEARC projekti, mis sobis ideaalselt konverentsi antud teemaga. Ettekandes tutvustasime moodle e-õppe kursust „Robotpainutus“ (Robotbending) https://moodle.edu.ee/course/view.php?id=32515 ja sama teema e-õppe materjale, mis asuvad INLEARC projekti kodulehel: http://www.tthk.ee/inlearcs/robot-bending/ .
Ettekannet kuulati suure tähelepanuga ja kõige suurem huvi oli meie lähenemisele n-n. tööpõhisele õppele, kui viime ettevõtete tootmiskonnad kooli virtuaalsetesse distantsõppe keskkondadesse kasutades erinevaid digitehnoloogilisi vahendeid.

22.-23.09.2021 toimus ERASMUS+ projekti INLEARC kolmas rahvusvaheline koosolek Hämeenlinnas Soomes, organiseerijaks SEINAJOKI UNIVERSITY OF APPLIED SCIENCES (SeAMK)
Projektipartnerite rahvusvahelisel koosolekul keskenduti intellektuaalse väljundi IO2 teemadele IO2-A2, IO2-A3 ja IO2-A4 ning intellektuaalsele väljundile IO3. Samuti toimus diskussioon ja ajurünnak teemal “Kuidas kasutada AI-d e-õppe materjalides?”
12.-13.05.2022 toimus ERASMUS+ projekti INLEARC neljas rahvusvaheline koosolek Riias, Lätis, organiseerijaks Riga Technical College (RTK)
Projektipartnerite rahvusvahelisel koosolekul arutati IO1 tagasisidet ning IO2 ja IO3 arenduse teemasid. Samuti toimusid diskussioonid ja ajurünnak AI kasutamise teemal e-õppe materjalides ning use-case‘ide koostamise teemal. Arutati ka projekti levituse teemasid.
20.05.2022 toimus Erasmus+ INLEARC projekti levitusüritus Lätis, Riias.



23.08.2022 toimus Erasmus+ INLEARC projekti levitusüritus Soomes, Seinajokil.
24.08.2022 toimus Erasmus+ INLEARC projekti tulemusi tutvustav seminar (levitusüritus) Tallinna Tööstushariduskeskuses, organiseerijaks IMECC
Projektimeeskond tutvustas INLEARC projekti tulemusi, sh Jüri Riives (IMECC OÜ) andis lühiülevaate projektist, selle eesmärkidest ja tulemustest. Eduard Brindfeldt (Tallinna Tööstushariduskeskus) tegi ettekande teemal „Nutikas õppeotstarbeline platvorm mehhatroonika ja robootika valdkonnas“, Madis Moor tutvustas projekti raames välja arendatud use-case ning Kristo Vaher Tallinna Tehnikakõrgkoolist rääkis virtuaalsest maailmast tööstusest.
Sündmus toimus Tallinna Tööstushariduskeskuses.
Projekti võib pidada väga edukaks – projekti raames töötati 3 riigi (Eesti, Soome ja Läti) partnerite koostöös välja vajaduspõhised õppematerjalid (use-case’id) ning mida piloteeriti õppeprotsessis. Samuti küsiti use-case’ide osas tagasisidet nii tööstusekspertidelt (sh erialaliitudelt), õppeasutustelt kui tööstusettevõtetelt. On hea meel tõdeda, et väljatöötatud õppematerjale kasutatakse aktiivselt nii parterorganisatsioonides kui ka näiteks Tallinna Tehnikaülikoolis ja Tallinna Tehnikakõrgkoolis.



26.08.2022 toimus Erasmus+ INLEARC projekti lõpuseminar Tallinna Tehnikaülikoolis, organiseerijaks IMECC
ERASMUS+ INLEARC (Intelligent e-learning systems in robotics/mechatronics) projekti lõpuseminar toimus 26.augustil 2022.
Lõpuseminaril kohtusid projekti partnerid viimast korda, et võtta kokku projekti tulemused, teha plaane uuteks koostöödeks ning samuti oli võimalus külastada TalTechi laboreid ja demokeskust. Projekti viimase kohtumise põhiteemadeks oli kõikide planeeritud tegevuste (robootika ja mehhatroonika valdkonna digitaalsete kompetentside metoodika, koostatud e-õppematerjalid, õppematerjalidele saadud tagasiside) läbivaatamine ning lõplik analüüs.
Projekti partneriteks on:
- IMECC OÜ (IMECC), Eesti
- Tallinna Tööstushariduskeskus (TTHK), Eesti
- Seinäjoe Ammattikorkeakoulu (Seamk), Soome
- Riga Technical College (RTK), Läti
INEARC projekti peamisteks tulemusteks on:
- Robootika ja mehhatroonika valdkonna digitaalsete kompetentside metoodika.
- Targad robootika ja mehhatroonika e-õppematerjalid (sidustatud tehisintellektiga).
- Digitaalse õppeplatvormiga integreeritud uued e-õppematerjalid (kättesaadavad Moodle keskkonnas).
INLEARC projekt lõppes äärmiselt edukalt! Lisaks täidetud eesmärkidele on suur osakaal projekti praktilisel rakendamisel Eesti haridusasutustes ja projektipartnerite juures ning lisaks tugevalt tihenenud koostöö projekti partnerite vahel, mis kestab edasi ka peale projekti lõppu.

